Compétence
Analyse un système ACM, détermine les composants nécessaires à la connexion et prépare la documentation pour un projet ACM prêt à être mis en oeuvre.
Objectifs
- Sous guidance, établit les cahiers des charges et détermine les composants pour un projet ACM simple.
- Compare les composants ACM et sélectionne des composants appropriés en fonction des caractéristiques électrotechniques.
- Classifie un système dans sa complexité fonctionnelle dans le système supérieur et le décrit.
- Analyse et documente les limites des systèmes et des sous-systèmes. Identifie et documente les interfaces entre les systèmes.
Description détaillée du module 299
Vue globale des sujets
Ce module est réparti en plusieurs sous-cours avec des enseignants différents, voici une vue globale:
10 – Principes fondamentaux du génie électrique
- électricité base, loi d’ohm, résitance. (on retrouve des sujets dans le cours d’électronique analogique)
20 – Règles de la technique
30 – Types de schéma
40 – Technologie numérique
50 – Technologie et protocoles de communication
- bus…
- Connaît la structure de base de diverses technologies de communication normalisées (par ex. Ethernet, bus, LPN et de divers protocoles (par ex. BACnet, SIP).
60 – Coûts d’investissement et coût d’exploitation
70 – Plan et spécification des coûts de construction
80 – Réduire la complexité
90 – Travail de projet
- Exposé sur un projet que vous avez réalisé (tout ou partie) dans votre entreprise.
Cours
50 – Technologie et protocoles de communication
Le bus dans la transmission de données
Dans le domaine informatique, un bus est un système de transmission de données commun.
On peut faire une analogie avec une ville. Lorsque l’on veut se rendre d’une maison à une autre, on ne crée pas une route privée par chemin. (Sinon une école risque d’avoir des milliers de routes qui pointe vers elle !!)
Pour rationaliser les ressources. Nous mutualisons les voies de communication. Il y a par exemple une grande (auto)route qui traverse une ville et les maisons sont toutes reliées à cette grandes artère de communication.

Ainsi les bus sont très présents dans les systèmes informatiques.
Il y a 3 grandes catégories:
- Le bus interne qui permet la communication à l’intérieur d’un ordinateur.
- Le bus de communication informatique qui relie des périphériques (ex: USB)
- Le bus de terrain, l’équivalent du bus de communication externe, mais dans le domaine de l’industrie. (ex: bus CAN)
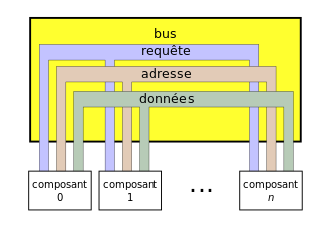
L’architecture de base d’un ordinateur est construite autour de 3 bus:
- le bus de données qui transporte les données échangées entre le processeur, les mémoires et les entrées-sorties (I/O).
- le bus d’adresse qui permet d’inscrire l’adresse (source ou destination) de l’information qui va transiter sur le bus de données.
- le bus de contrôle qui précise le type d’opération, la requête, parfois l’horloge. Ceci permet par exemple de savoir si la valeur est lue ou écrite (le sens du transit des données)

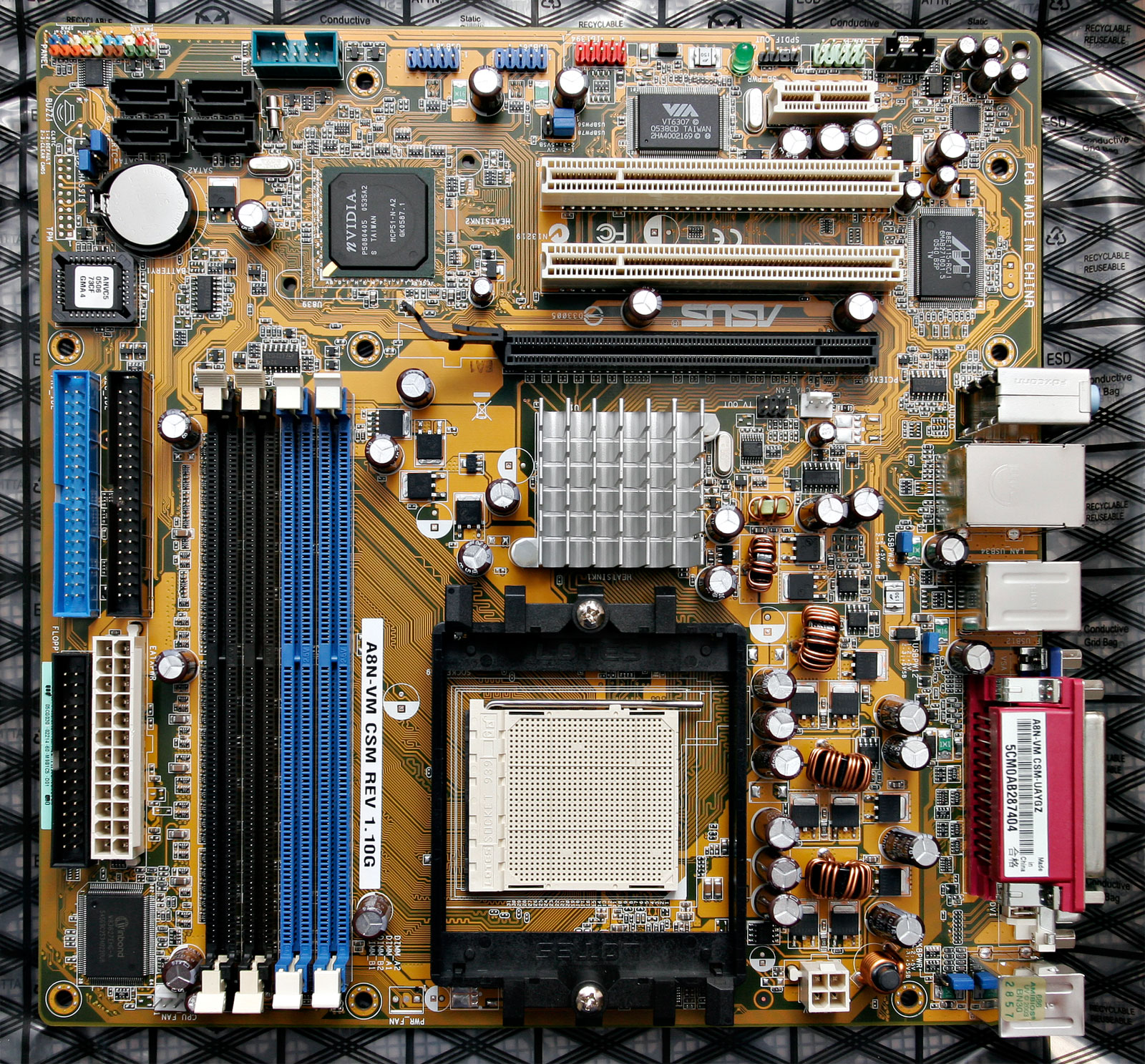
Le bus de communication le plus connu est certainement l’Universal Serial Bus, l’USB. Il permet de relier de nombreux périphériques.
En interne, on peut citer quelques noms comme SATA, PCI, NVME…
En ce qui concerne le bus d’adressage, c’est sa taille qui va limiter le nombre d’adresses possibles.
Si je reprends l’analogie de ma ville. Chaque maison a une adresse postale. Si je veux envoyer une carte postale, je dois indiquer l’adresse de destination. Si il y a énormément de maisons dans ma ville je devrais avoir des numéros énormes.
Si ma carte postale est trop petite, je ne pourrais plus écrire les numéros de rue et donc je ne pourrais plus accéder à certaines adresses !
Pour un bus avec 32 lignes d’adresse on peut adresser 232= 4’294’967’296 octets (une cellule mémoire = 8 bits).
Ce qui nous permet d’adresser 4 gibioctets (Gio).
(nous utilisons ici le système international d’unité avec des préfixes binaires. Pour plus d’explication voir le module 146…)
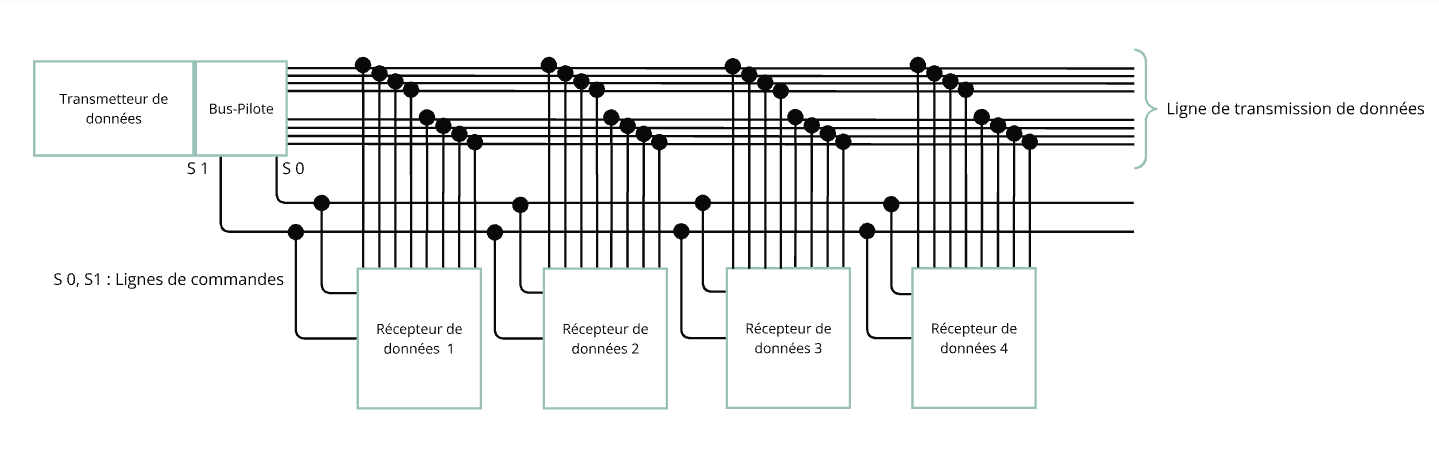
Bus parallèle et bus séries
Une des caractéristique principale des bus est son mode de fonctionnement:
- bus en parallèle
- bus en série
A ça s’ajoute aussi la topologie du bus et sa fréquence d’horloge.
Le bus parallèle est le plus direct pour transmettre des données. Par exemple si l’on décide d’utiliser l’octet comme unité de base de la largeur d’un bus, on peut envoyer les 8 bits de l’octet simultanément d’un élément à un autre du bus.
Les bus séries demandent moins de câbles, ainsi quand la communication augmente en distance, on a tendance à privilégier un bus série.
Le bus série fait passer les informations entre les éléments l’une derrière l’autre en les étalant dans le temps.
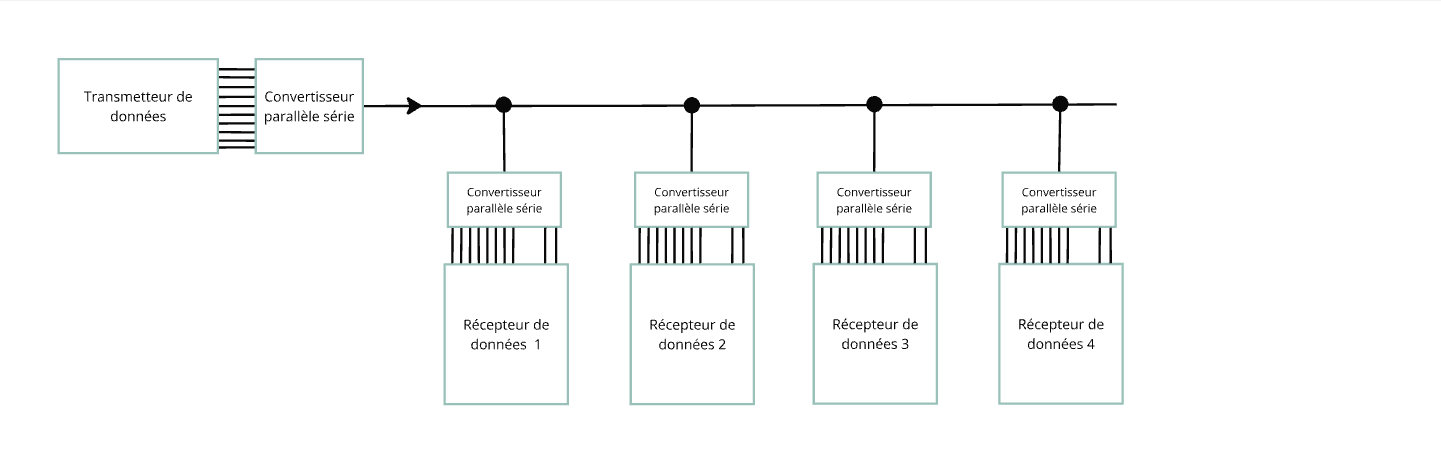
Quand on passe à une transmission en série le principe inclus la notion de temps. On a va prendre les informations et les sérialiser.
Ceci implique l’utilisation d’un protocole qui défini dans le temps comment son structurée les données, avec un signe de départ et un signe de fin.Un peu comme des humains qui se rencontre pour une session ensemble. Il se disent « bonjour » pour marquer le début et « au revoir » à la fin.
Voici un exemple avec la trame du protocole UART.

Constitution de la trame:
- un bit toujours à 1 pour indiquer le départ.
- les bits de données (entre 5 et 9 bits à la suite)
- un bit de parité (pour détecter une éventuelle erreur de transmission) On reviendra à ce principe dans le module 114 – Codage Chiffrage -.
- un bit toujours à 1 qui indique la fin de la trame.
- l’état de repos est à 1 (en fait +5V, on utilise les niveaux TTL)
Pour en savoir plus sur les différents modes de communication, i2C, uart et spi, voir ces vidéos:
- La Communication Série – Introduction
- La Communication Série – Le UART
- La Communication Série – Le SPI
- La Communication Série – Le I2C
Domaine d’application
Bus interne à un ordinateur
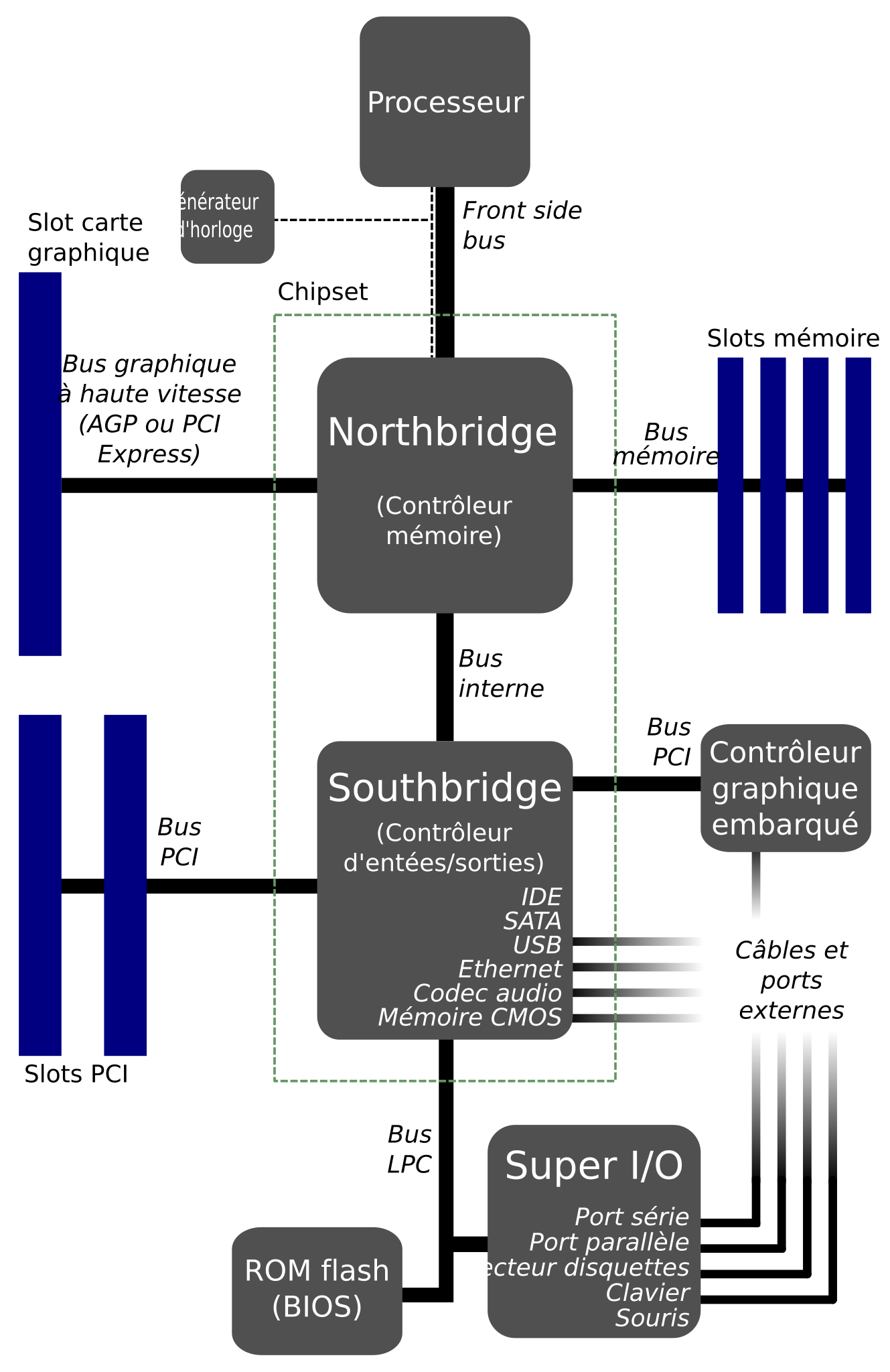
Jusqu’en 2004, dans l’architecture compatible IBM PC, les contrôleurs de bus en lien avec l’extérieur d’un microprocesseur d’ordinateur personnel sont au nombre de deux:
- Le northbridge qui le relie aux périphériques rapides tels que la mémoire, et les cartes graphiques PCI
- Le southbridge qui le relie à tous les périphériques internes plus lents et le bus PCI
Bus pour relier des périphériques
L’USB est de nos jours le plus connus des bus pour relier des périphériques externes.
Historiquement le port série (port COM) était le bus le plus utilisé pour relier des périphérique à l’aide du protocole RS-232. (voir cette explication didactique à propos de RS-232)

Pour les imprimantes on utilisait le port parallèle. On parlait même de « port imprimante ». (le rose). C’est un connecteur db25. Donc il comporte 25 fils.
Une partie des ses fils servent à transmettre un octet de données. Le fil n°10 sert à acquitter les caractères reçus. Les autres fils servent à l’alimentation électrique et aux commandes. On a notamment le fil 12 qui indique qu’on a plus de papier. De nos jours ça semble surprenant d’avoir un fil qui ne sert qu’à indique qu’il faut ajouter du papier !
| Numéro | Nom | Désignation |
|---|---|---|
| 1 | _STR – Strobe | Balayage |
| 2 | D0 – Data bit 0 | Bit de données 0 |
| 3 | D1 – Data bit 1 | Bit de données 1 |
| 4 | D2 – Data bit 2 | Bit de données 2 |
| 5 | D3 – Data bit 3 | Bit de données 3 |
| 6 | D4 – Data bit 4 | Bit de données 4 |
| 7 | D5 – Data bit 5 | Bit de données 5 |
| 8 | D6 – Data bit 6 | Bit de données 6 |
| 9 | D7 – Data bit 7 | Bit de données 7 (poids fort) |
| 10 | ACK – Acknowledgement | Acquittement |
| 11 | Busy | Occupé (lecture des données) |
| 12 | Paper Out | Plus de papier |
| 13 | Select | Sélection |
| 14 | Auto feed | Saut de page |
| 15 | Error | Erreur |
| 16 | Reset | Réinitialisation |
| 17 | Select Input | Sélection de l’entrée |
| 18-25 | GND | Masse |
C’est depuis l’arrivée du iMac en 1998 qui chamboule pas mal les connecteurs. En effet, l’iMac en plus de n’avoir plus de lecteur disquette, n’a plus non plus de port série. Il utilise pour la première fois uniquement des ports USB.

Le port USB existait déjà sur certains PC depuis 1996 mais il n’existait aucun périphériques. Ainsi Epson est le premier fabriquant à produire une imprimante USB.

L’absence de lecteur disquette va aussi pousser à l’invention de la « clé USB« . pour stocker et partager des données.
Bus de terrain
Dans le monde industriel on utilise des bus de terrain.

Voici encore une liste de nombreux bus informatiques….
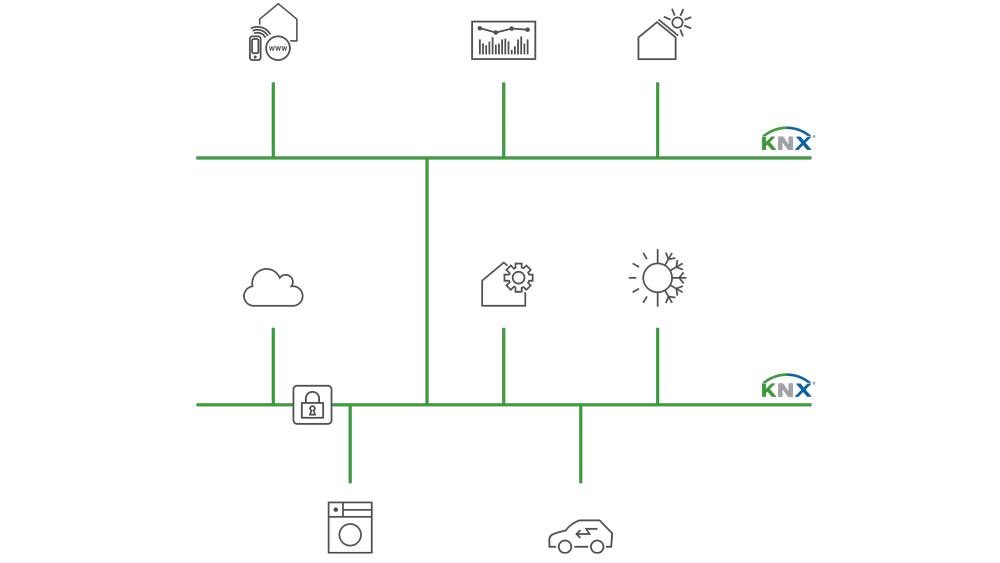
Bus KNX
Le bus KNX est un standard utilisé en électricité et en automation du bâtiment.
Il permet de relier des capteurs et des actionneurs.
Le cas le plus simple est la gestions des lampes. Dans une installation traditionnelle, chaque lampe est reliée à son/ses interrupteurs. Si dans le futur, j’ai envie d’ajouter un interrupteur, ou de changer le lien entre un interrupteur et une lampe. C’est compliqué.
Avec un bus tel que KNX, il y a une couche logicielle avec des adresses qui permet programmer quel actionneur (interrupteur) va permettre d’agir sur quel lampe ou groupe de lampe.
Le bus KNX permet ainsi beaucoup plus de souplesse et de possibilités dans la gestions d’une installation. Mais ceci au prix de la complexité de la programmation qui fait souvent peur aux électriciens.
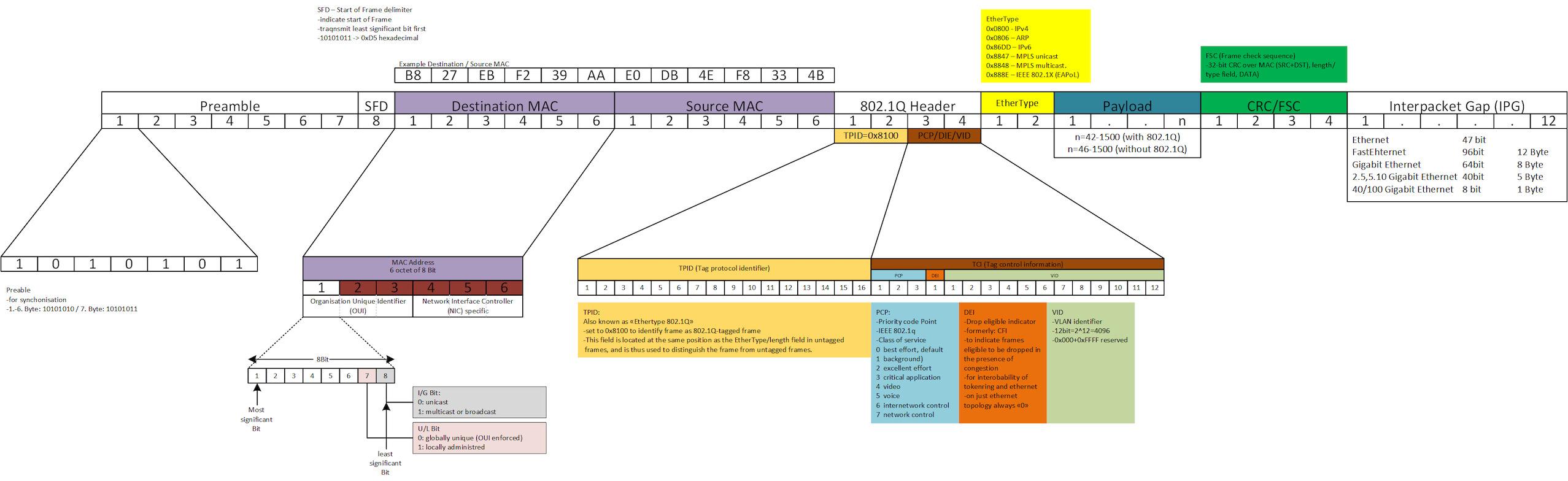
Communication Ethernet
Le protocole Ethernet est également un des plus utilisé pour les réseaux locaux: LAN.
C’est un protocole de couche 2 dans le modèle OSI. Il fourni un adresse physique de la carte réseau pour adresser des messages. C’est l’adresse MAC.
La communication en ethernet se base sur une trame de donnée dont voici la structure:

En mode développé:
Notion de Protocole
En télécommunication nous utilisons beaucoup de protocoles. Mais revenons aux racines. Qu’est-ce qu’un protocole ?
Le simple fait de dire « Bonjour » et de faire une poignée de mains est un protocole entre humains pour se saluer.
Voir le fonctionnement du protocole SMTP pour envoyer des e-mail. Il a la particularité de dire « HELO » pour faire un appel à discuter avec son homologue. Ce dernier lui répond l’inverse « OLEH » pour dire qu’il est prêt.
Exercice:
Décrivez le protocole pour aller manger dans un restaurant. (arrivée, commande, paiement, etc..)
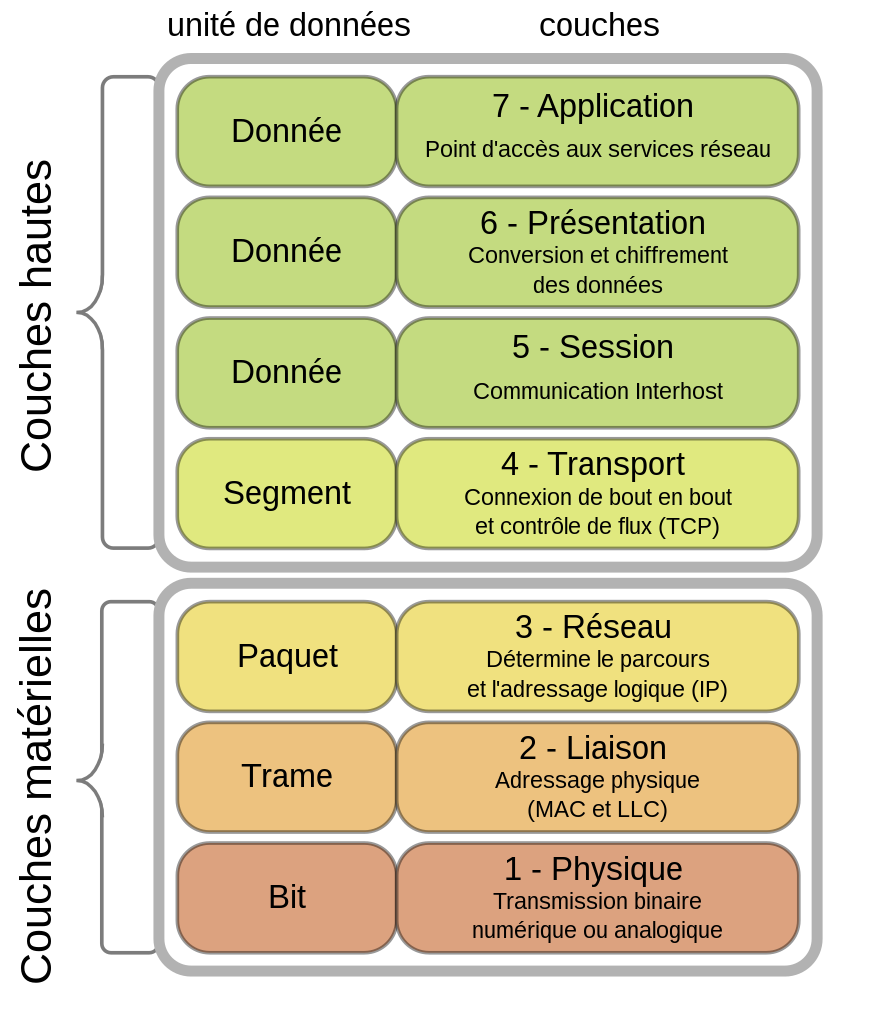
Modèle OSI
Pour chaque couche du modèle OSI on a des noms d’unité de donnée différents.
- couche 1 => bits ou symbole
- couche 2 => une trame
- couche 3 => un paquet (ip)
- couche 4 => un datagramme / segment TCP
60 – Coûts d’investissement et coût d’exploitation
Objectifs
À la fin de cette unité, vous pourrez…
- Expliquer la différence entre les coûts d’investissement et les coûts d’exploitation.
- Calculer le coûts du cycle de vie de votre véhicule.
- Pour les produits de votre vie professionnelle quotidienne, comparez les coûts d’investissement et les coûts d’exploitation.
Lors de l’achat d’un produit, nous portons souvent une attention particulière aux coûts d’acquisition. Le prix doit être aussi bas que possible afin que nous ayons le sentiment d’avoir fait un bon achat.
C’est Black Friday sur Temu…. J’ai l’impression de faire mes courses comme un milliardaire !
Dans ce cours nous allons vous rendre attentif que le prix – le coût d’investissement – n’est qu’un facteur du coût total d’un produit.
Nous allons calculer le coût du cycle de vie.
Le coût du cycle de vie = coût d’investissement + coût d’exploitation.
Le coût d’investissement est souvent simple à voir car il est affiché. En revanche le coût d’exploitation est beaucoup plus difficile à clarifier.
Voici quelques exemples de coûts qui composent les coûts d’exploitation:
- Le coût de l’énergie
- Les frais de licence
- Les frais de formation
- Les frais de maintenance
Exemple des ampoules à LED
Dans la cage d’escalier d’un immeuble, 10 vieilles ampoules à incandescences sont remplacées par des ampoules à LED.
La nouvelle installation est totalement identique en ce qui concerne l’éclairement.

Nous avons les informations suivantes sur leur utilisations:
| Coût d’acquisition par unité | Puissance | Temps allumée / jour | Durée de vie | Coûts énergétiques par kWh | Coût énergétiques par jour (pour 10 lampe) | |
|---|---|---|---|---|---|---|
| Lampe à incandescence | CHF 2,5 | 60W | 3h | 1000h | 20ct | CHF 0,36 |
| LED | CHF 15.- | 7W | 3h | 30’000h | 20ct | CHF 0,042 |
K = Ta * P * t
- K → Coûts énergétique [CHF]
- Ta → Prix du kWh [CHF]
- P → Puissance [kW]
- t → Temps [h]
Calculez les coûts d’investissement et les coûts d’exploitation après 1, 2 et 5 ans.
On peut simplifier le problème:
- LED: les coûts d’investissement totaux sont inclus dans la 1ère année.
- Les ampoules a incandescence doivent être remplacées chaque année en raison de leur durée de vie de 1000h
Réponses
Réponses au calcul
| 1 année | 2 ans | 5 ans | |
|---|---|---|---|
| Incandescence | Exploitation: CHF 131.40 Investissement: CHF 25.- Total: CHF 156.4 | Exploitation: CHF 262.80 Investissement:CHF 50.- Total: CHF 312.8 | Exploitation: CHF 657.- Investissement:CHF 125.- Total: CHF 782.- |
| LED | Exploitation: CHF 15.30 Investissement:CHF 150.- Total: CHF 165.3 | Exploitation: CHF 30.60 Investissement:CHF 150.- Total: CHF 180.6 | Exploitation: CHF 76.50 Investissement:CHF 150.- Total: CHF 226.5 |
Calcul du coût d’un café
Quel est le coût d’un café ?
- un café capsule
- un café à partir de grain moulu
Nous avons deux machines à café à comparer.
Machine à capsule
La Delizio Carina:

Coût d’investissement: CHF 20.- (offre black Friday au lieu de CHF ~70.-)
Coût d’exploitation: CHF 19,90.- pour 48 capsules
(Pour info, il y a entre 7g à 9g de café dans une capsule)

Machine à capsule à grain

Coût d’investissement: CHF 300.-
Coût d’exploitation: CHF 22,70 pour 1kg de café en grain.
On compte en gros 10g de café pour faire un café. (et 7,5 g pour un expresso)
Pour arrondir on peut partir du principe que l’on a 100 cafés par paquet.

Réponses
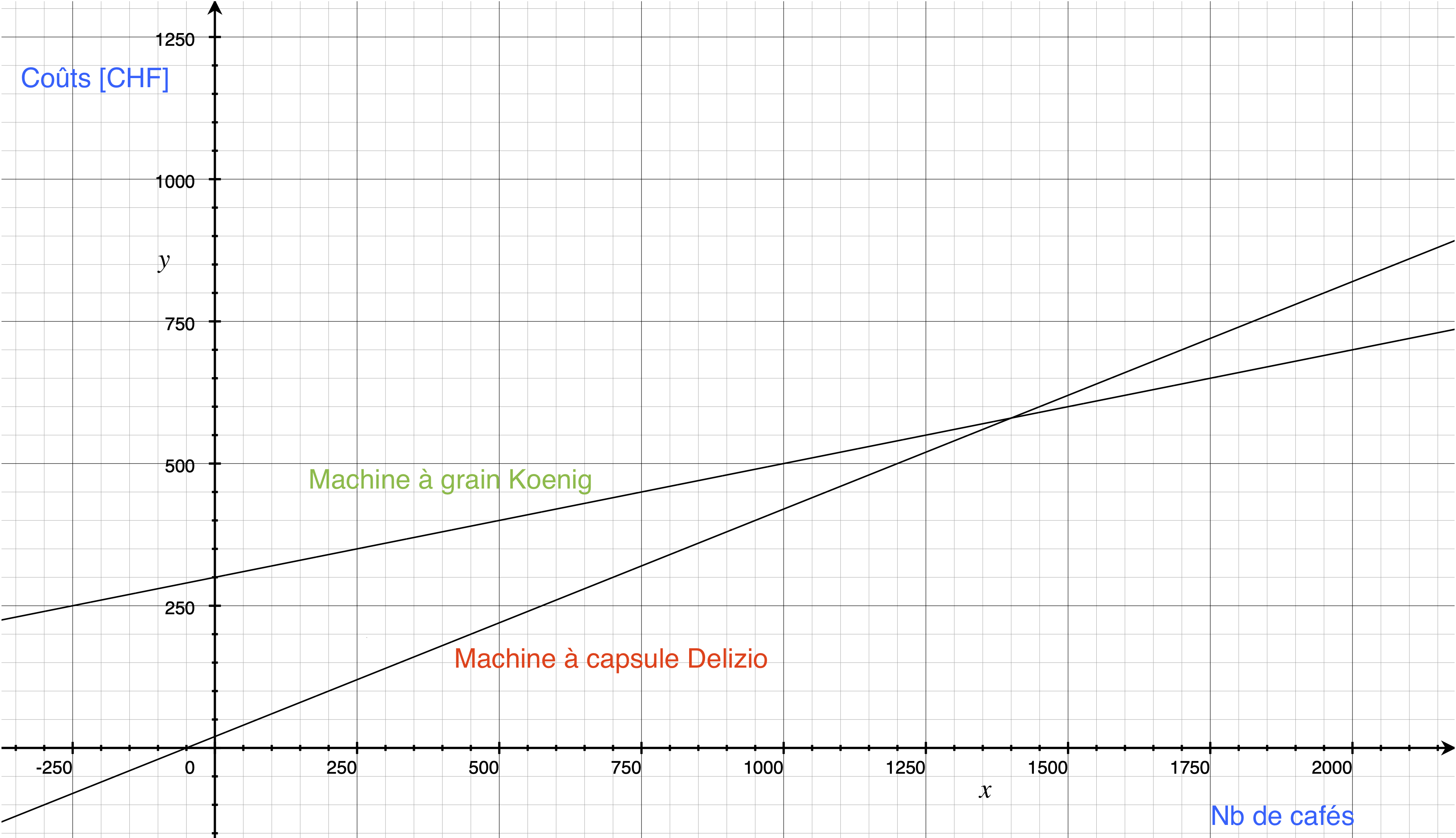
L’idée c’est de faire un graphe du coût en fonction du nombre de café.
On a une équation linéaire de type: y = a*x + b
Donc on calcule un coût unitaire par café. (arrondi)
- 40 ct / café pour la capsule
- 20 ct / café pour le grain
On ajoute le coût de la machine comme point de départ.
Coût café capsule = 0,4*x + 20
Coût café en grain = 0,2*x+300
1450 W pendant ~20 seconde….
Question subsidiaire, qu’en est-il de la consommation énergétique ?
Calcul du coût d’un véhicule
- Quel est le coût d’une voiture ?
- Une voiture électrique est-elle plus ou moins cher qu’un voiture à essence ?
- Combien coûtes les frais d’exploitation d’un vélo ?
C’est l’occasion de répondre à ce genre de question sous l’angle des coûts d’exploitation qu’on néglige souvent et en fonction du coût d’achat très variable des véhicules suivant leur nature et leur technique.
Pour démarrer, voici quelques pistes à suivre:
- Coût d’achat
- Carburant (essence, électricité, chocolat…)
- Pneus
- Coût de maintenance, entretiens réparation
- Assurance
- Taxes sur les véhicules
- Parking
- Vêtements (casque, housse, veste, etc..)
Pour compléter ses idées, voici un débat sur reddit à propos du coût annuel d’une voiture en Suisse…
Comparis nous dit qu’une voiture ça coûte CHF 10 000.- / an…. vrai ou faux ?
Autres domaines
On peut faire le même exercice pour de nombreux autres domaines.
Voici quelques idées:
- Imprimante laser ou jet d’encre ?
- Machine à café à capsule ou à grains moulu ?
- Panneaux photovoltaïque + pompe à chaleur ou chauffage à gaz ?
- etc…
Pour terminer on peut aussi aborder une toute grosse machine, un datacenter.
Infomaniak a investis 2,5 années de plus que normalement pour concevoir un datacenter qui utilise son surplus de chaleur pour chauffer un quartier de maisons.
Bilan financier, bien que le coût d’investissement est plus élevé, les coûts d’exploitation son moins élevé. Et il est ainsi possible de proposer des services informatiques encore moins cher.
A voir précisément à 17min40…
70 – Plan et spécification des coûts de construction
La construction d’un bâtiment est une tâche complexe. Ainsi pour réduire la complexité de cette tâche. Les entreprises de construction Suisse on créé un plan de construction global.
Plan des coûts de construction
Le plan comporte une numérotation pour répartir les différents domaines:
- 0: parcelles
- 1: travaux préparatoires
- 2 Bâtiment
- 3: Installations
- 5: Coût de construction auxiliaires
- 6-8: postes de réserves
- 9: équipement
Comme son nom l’indique l’informaticien du bâtiment agit généralement dans le domaine n°2 le numéro 2: le bâtiment.
Puis chaque domaine d’activités peut être précisé avec des sous catégories, il suffit d’ajouter des chiffres.
Voici par exemple des catégories en lien avec les informaticiens du bâtiment:
- 23: Système électriques
- 24: Chauffage, ventilation, système de climatisation (CVS)
- 25: Installation sanitaires
- etc..
Chaque corps de métier – regroupé en association professionnelle – est responsable d’une partie du plan global.
Ces associations professionnelles décrivent ensuite leur sous catégories.
C’est l’organisation EIT.Swiss qui gère la partie liée au travail d’électricité et d’automatisation du bâtiment.
Voici les codes en lien avec l’électricité et l’automatisation du bâtiment. (pdf)
Description du travail
Dans une première approche de création d’un plan global pour la construction d’un bâtiment, chaque professionnel concerné, va décrire dans sa partie du plan l’état à atteindre.

Voici un exemple de plan pour ce quartier d’immeuble (pdf)…
Au numéro 237, soit « automatisation du bâtiment » on trouve la description suivante:
MCRG / GA : (Mesurer, Commander, Réguler, Gérer) / Gestion des Alarmes:
Un système de gestion technique de bâtiment clé en main doit servir à la surveillance, à l’optimisation, à la saisie des données, à la commande et à la régulation des principales installations techniques de chaque bâtiment.
KNX:
Dans tous les appartements en copropriété, les stores sont commandés par un bus KNX. Les alarmes météorologiques de la station météo sont transmises aux stores via le bus KNX.
Le plan global décrit donc l’état recherché, le but a atteindre. Mais on ne connait pas encore les étapes pour atteindre ce but.
Ce qui nous mène au Catalogue des Articles Normalisés, le CAN.
CAN – Catalogue des Articles Normalisés
Ce catalogue décrit le détail des tâches et bonnes pratiques pour mener à bien la construction qui mène à la description que l’on trouve dans le plan.
Afin de normaliser les descriptions d’un chantier de construction, le Catalogue des Articles Normalisés référence 1,3 million de prestations (des lignes qu’on peut voir sur une facture.)
Le CAN fournit une base commune pour la planification, l’appel d’offres, et l’exécution des projets de construction. Il facilite la communication entre les différents acteurs du secteur en assurant que tout le monde utilise les mêmes termes et définitions pour décrire les travaux à réaliser.
Calcul des prix
Le Catalogue des Articles Normalisés (CAN) ne définit ni ne recommande des prix déterminés pour les prestations de construction. En revanche, l’association professionnelle EIT.Swiss propose des outils de calcul du CAN qui permet d’intégrer ses coûts et de trouver un prix juste pour réaliser ses offres.
Il existe également des logiciels qu intègrent le CAN afin de faciliter la création d’offre et la facturation.
Le logiciel WinProgitel de polylog est un exemple d’un tel logiciel de gestion.
Définir un prix
Donner un prix à une prestation n’est pas une choses aisée. Il y a plusieurs méthodes. Nous avons vu ci-dessus la méthode pratiquée par les électriciens.
Est-ce que cette méthode est adaptée aux informaticiens du bâtiment ?
Cette question reste ouverte. Mais en général les entreprises d’informatiques n’utilisent pas les méthodes des électriciens.
Les informaticiens du bâtiment étant à cheval entre les métiers de l’électricité et de l’informatique sont aussi à cheval entre plusieurs méthodes de facturation.
Comment est-ce que l’on définit un prix ?
Il y a en général 3 méthodes principales pour gagner de l’argent:
- Vendre son temps
- Vendre des produits
- Vendre ses services d’intermédiaire dans une relation
Ainsi pour fixer un prix, on peut choisir un tarif horaires et compter son temps de travail.
Du coup, quel est le tarif horaires pour devenir milliardaire ?
=> C’est pas ainsi que l’on fait !
Quand on a que 24h par jour. On est vite limité avec cette méthode. Une autre méthode c’est de devenir patron et de vendre le temps des autres !
(mais il faut quand même payer les autres un minimum !)
Vendre des produits est une bonne méthode pour découpler le revenu du temps. Là on peut commencer à exploser ses revenus.
On peut même retourner le temps à son profit pour gagner toujours plus avec le temps qui passe.
C’est la méthode de Bill Gates, vendre le DOS (puis ensuite, Windows, et Office) pour 1$ l’exemplaire au lieu de facturer son temps de travail à IBM ou de lui vendre un OS une fois pour toute.
Comment fixer le prix d’un produit ?
Il faut regarder quelle est l’alternative à son produit sur le marché. Donc la valeur n’est pas intrinsèque à ce que l’on fait. Elle est relative à ce qu’est prêt à mettre l’acheteur dans son contexte.
De l’eau en plein désert ça vaut cher. Alors qu’à côté d’une fontaine publique gratuite c’est pas évident à vendre.
Une autre manière de gagner de l’argent, c’est de vendre ses services d’intermédiaire entre un vendeur et un acheteur. C’est le principe de la petite annonce, de la publicité, c’est le business modèle de google, de facebook.
Mais il y a encore mieux. C’est de détenir une place de marché, et de prélever des « redevances » sur transaction. C’est le principe de l’App store d’Apple, et surtout de la marketplace d’Amazon.
Le cas d’Amazon est un cas d’école à étudier plus en détail.
La méthode Amazon
Amazon est principalement une place de marché.
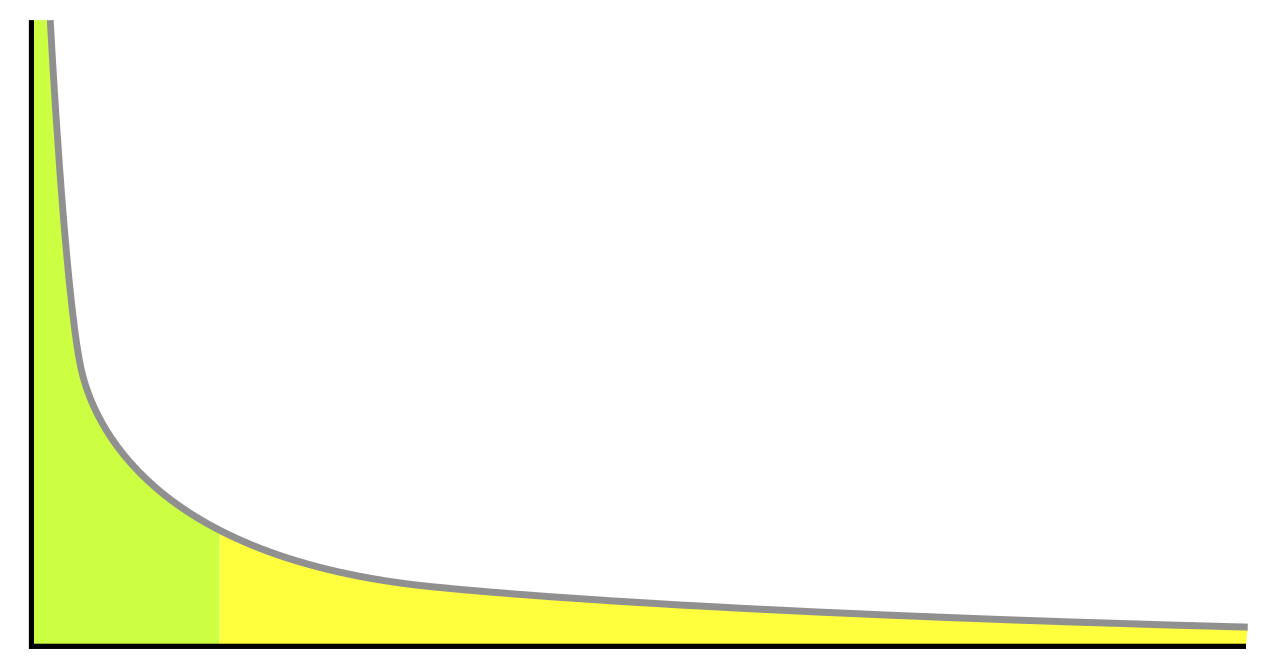
Amazon exploite le principe de la longue traine. On y trouve TOUT !
Une librairie au centre ville, paie un loyer très élevé. C’est le prix de la visibilité. Ainsi elle a une surface minimale, adaptée à ce qu’elle vend.
En conséquence une librairie va principalement vendre des « best seller ». Une libraire aura dans son stock uniquement les livres qui se vendent bien et les nouveauté à tester.
Donc il sera facile de trouver Harry Potter, et tous les livres obligatoires dans les écoles du coin…
Mais pour tous les reste, le vendeur va vous dire qu’il lui faut commander.
En revanche, Amazon n’est pas de vitrine publique physique. Amazon c’est une vitrine web accessible de partout, et des entrepôts en campagne là où la surface est beaucoup moins chère.

Amazon France propose, en 2024, 12 millions de produits vendus directement par Amazon, et plus 353 millions vendus par des vendeurs tiers. (en 2015, c’était 150 millions)
En France, une librairie située au centre d’une ville c’est en moyenne 7500 références sur ~65m2.
Sur l’image de la longue traine, il y a une surface verte. C’est ce que les librairies vont vendre. Puis il a y une surface jaune. C’est là qu’Amazon fait la différence.
Avec des coûts de stockage faible. Amazon dispose de livre qui ne sont vendus qu’une fois par an, ou même moins.
La librairie vend de nombreuses fois peu de livre.
Amazon vend de nombreux livres peu de fois. (en + de vendre les best sellers !)

Avec son offre gigantesque Amazon attire le chaland !
La place de marché se renforce et s’est naturellement que les vendeurs viennent toujours plus nombreux pour proposer leurs produits, renforçant encore l’attractivité.
Amazon n’a pratiquement plus rien à faire, sauf prélever sa commission d’intermédiaire entre le vendeur et l’acheteur.
Une telle infrastructure coût très cher. Mais là encore Amazon a une astuce et fait payer son infrastructure de cloud à d’autres…
En effet, Amazon s3 est un des cloud les plus populaires !
Quid du référencement et de la pub ?
Ici Amazon utilise la technique largement répandue en afrique du cousin rabatteur pour le marchand de tapis.
Amazon propose un programme d’affiliation. Je peux créer des liens sur mon site web vers Amazon et si une personne utilise ce lien pour aller acheter un produit. Je reçois une commission. (Allez clique sur mon lien pour aller acheter un SSD... ou une machine à café… et fait moi gagner de l’argent.. )
Ainsi le référencement web naturel, se fait très vite avec une opération « win-win ».
L’algorithme du page rank qui a fait le succès de Google repose sur le principe que plus un site est pointé par des liens externes, plus il est recommandé dans les résultats de recherches.
Donc Amazon sort très vite vu que je suis indirectement payé pour faire des liens sur ce site.
La méthode ultime qui n’est pas dans les livres d’économie
Finalement voici la méthode pour devenir riche qui n’est pas mentionnée dans les livres d’économie, c’est créer la monnaie.
Le Jeu de la Monnaie explique très bien l’histoire de la monnaie et des systèmes économiques.
Appréhender la complexité
Le monde est complexe, comment l’appréhender simplement ?
Voici deux méthodes:
- l’analyse
- la systémique
L’analyse
Quand on veut étudier un système complexe, la méthode classique proposée, est l’analyse. Ce mot signifie littéralement: décomposer (en parties plus petites.)
L’analyse, c’est la méthode qui réduit la complexité en petites parties plus faciles à comprendre séparément.
Si on veut comprendre une machine, on va analyser chacune de ses parties, chacun de ses composants. Si je connais le fonctionnement de chacun des rouage d’une montre je peux connaitre le fonctionnement de la montre.
Il est courant de décomposer un problème en couche pour réduire la complexité. Dans le domaine des réseaux informatiques, c’est ce que l’on fait avec le modèle OSI.
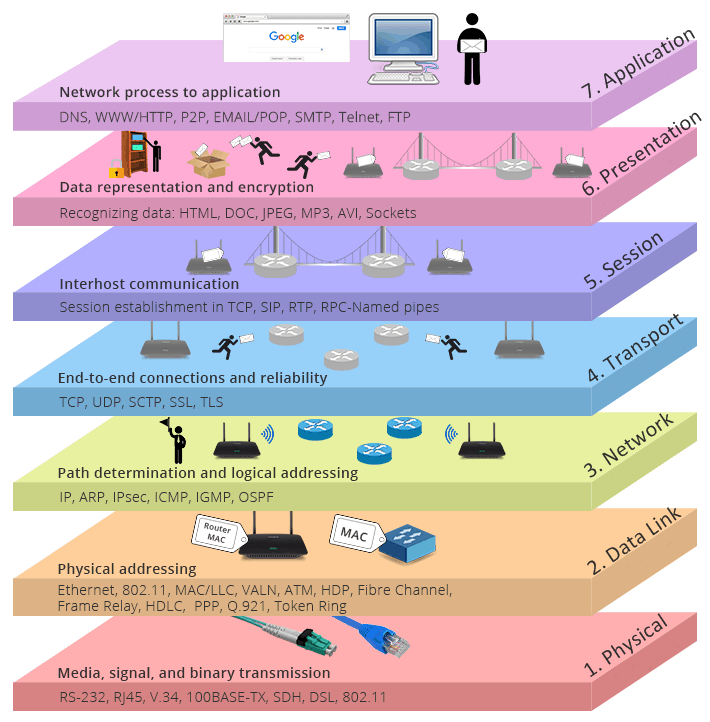
Il est humainement impossible de vraiment comprendre ce qui est mis en jeu quand je tape une url dans un navigateur web, et que plusieurs protocoles réseaux, chacun à leur niveau s’activent pour aller me chercher la ressources désiré à l’autre bout du monde !
Ainsi nous réduisons la complexité attribuant chaque protocole à des couches indépendantes, mais en contact, en interface.
En réalité chaque couche est imbriquée dans la couche précédente.
La systémique
La méthode d’analyse cartésienne de réduction de la complexité à des composants élémentaires est adaptée à l’étude des systèmes stables constitués par un nombre limité d’éléments. De plus elle est limité à des composants dont le comportement est simple à comprendre (par exemple une fonction linéaire, une proportion, une addition).
La méthode analytique atteint ses limites dans des systèmes tellement complexes que le système global n’est pas la somme de ses parties, mais autre chose qui émerge de là.
On parle de phénomène d’émergence.
Par exemple, l’Internet, n’est pas la somme des ordinateurs en réseau, mais quelques chose de plus, de nettement plus intéressant.
L’analyse n’est pas une bonne méthode pour étudier Internet. Comment étudier ce qui émerge d’un réseau en débranchant son ordinateur du réseau ?

On peut observer des phénomènes d’émergence dans de nombreux systèmes complexes, comme c’est le cas en biologie, en économie ou dans les systèmes sociaux. (le langage et son évolution)
L’Intelligence Artificielle générative correspond tout à fait à un phénomène d’émergence. Le principe de base étant juste de prédire le mot le plus probable à la suite d’une phrase. On est incapable de comprendre la mécanique de génération. On peut juste nourrir l’IA et la cadrer dans ses réponses.
Les effets d’émergence sont souvent composés d’un grand nombre d’éléments qui dont le comportement n’est pas prédictible, n’est pas programmé à l’avance pour un comportement précis. Ainsi le comportement de chaque élément peut se qualifier plutôt par l’instabilité, la fluctuation, le chaos, le désordre, le flou, l’ouverture, la créativité, la contradiction, l’ambiguïté, le paradoxe.
Pour décrire la complexité, en systémique on utilise régulièrement les termes suivants : vision globale, système, niveau d’organisation, interaction, rétroaction, régulation, finalité, évolution.
Pour bien comprendre les phénomènes d’émergence, ce qui peut émerger d’un cadre donné, nous allons jouer au Jeu de la Monnaie.